襄阳龙思达智控技术有限公司
主营产品:机床
13871752999
襄阳龙思达智控技术有限公司
主营产品:机床

2024年01月21日 09:26
悬臂气杆伸出→至前限位后传感器接收信号,手臂气杆伸出→至下限位后0.5s延時后气爪夹紧→0.5s延shi→手臂气杆缩回→至上限位后传感器接收信号,数控机床桁架机械手,悬臂气杆缩回→至后限位后传感器接收信号,旋转气缸使机械手右转→至右限位后传感器接收信号→悬臂气杆伸出→至前限位后传感器接收信号,手臂气杆伸出→至下限位后0.5s延shi后气爪松弛→机械手臂气杆缩回→至上限位传感器接收信号,车床桁架机械手,悬臂气杆缩回→至后限位传感器接收信号,旋转气缸使机械手左转→回归初始位置,完成一个搬运工作循环。若不按下SB6停止按钮,机械手会持续循环完成上述工作流程,若按下停止按钮,机械手会在完成当前循环后停止并回到原位即初始位置。
在机械手臂的液压缸选用上,要使液压缸的直径大一些,南漳桁架机械手,这样手臂的整体强度比较高,而对于液压缸的校核可以通过以下公式进行核对:
活塞杆直径的校核公式:
式中:F活塞杆上的作用力;[σ]活塞杆材料的许用应力。
缸体壁厚的校核公式:
式中:D缸筒内径;py缸筒的试验压力。
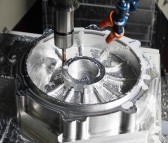
桁架机械手的运动为机械手在桁架上做水平运动,到达指ding位置后,机械手下降运动
X轴组件、Y轴组件、Z轴组件,三个运动组件为桁架机械手的核心组件,其定义规则遵循笛卡尔坐标系,各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械位组件、夹具、控制柜等部分组成。
1.桁架机器人机械手结构件通常由铝型材或方管,矩形管等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是桁架式机械手负载的主要承担者;
数控机床桁架机械手-龙思达-南漳桁架机械手由襄阳龙思达智控技术有限公司提供。襄阳龙思达智控技术有限公司(www.xylsdzk.com)在电子、电工产品制造设备这一领域倾注了无限的热忱和热情,龙思达一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创。相关业务欢迎垂询,联系人:苏先生。
联系方式